为了定量分析鱼在游动过程中的振幅、频率、前进速度等参数 , 有科学家设计了一个能让一条死鱼躯体产生波状游泳动作的机械装置 。

文章插图
这个装置通过在鱼的身体上插一排长杆 , 然后摇动装置上的凸轮来控制鱼的动作 。
当凸轮转动的时候 , 动杆就会驱动鱼体产生预定的波状运动 。
这样科学家就可以让鱼按照自己想要的方式进行运动 , 可以更方便地研究出具体的参数 。
记录下鱼运动的方式很多 , 但不管什么研究方式 , 最后都还是要总结成理论模型 , 才能了解运动的具体机制 。
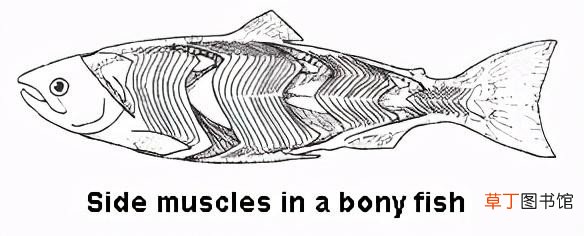
通过观察科学家发现 , 在鱼的游动过程中 , 鱼体的肌肉会按从头至尾的顺序进行收缩 , 身体逐个部位弯曲 , 产生向后的运动波 , 进而推动水流产生向前的推力 。
【鱼会游泳的原理解析 鱼儿为什么会在水里游】
文章插图
鲑鱼的肌肉排列顺序
至于这个推力是如何产生的 , 主要有两个理论来解释:
阻力理论(RFT)& 细长体理论(EBT)
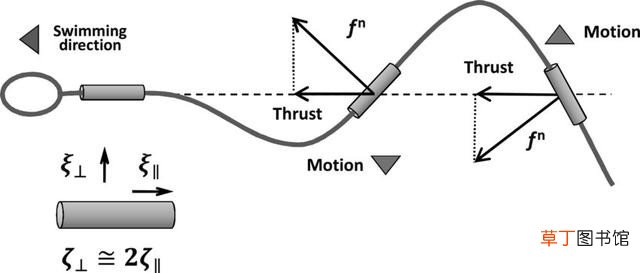
- 阻力理论
当鱼产生波浪式运动时 , 那么垂直于鱼体方向的阻力比平行于鱼体方向的阻力大 。其结果是在平行方向 , 也就是前进的方向上 , 产生一个推力 。
文章插图
阻力理论
- 细长体理论
这使得鱼体作为一个平面 , 可以通过小振幅的波动产生推力 。
这两个理论之间的最主要区别在于所产生的力量的类型 。
泰勒理论认为 , 让鱼向前游动的力产生于阻力 , 阻力的作用方向和鱼的运动方向相反 , 但与物体的运动速度相一致;莱特希尔则认为鱼向前的游动的力产生于反作用力 , 其作用方向与作用力相反 , 并与加速度保持一致 。
后来一个北京计算机科学研究中心的团队 , 通过超级计算机的模拟 , 对两个理论进行了验证 。
之后发现两个理论都是对的 , 但不同的鱼情况不太一样 。
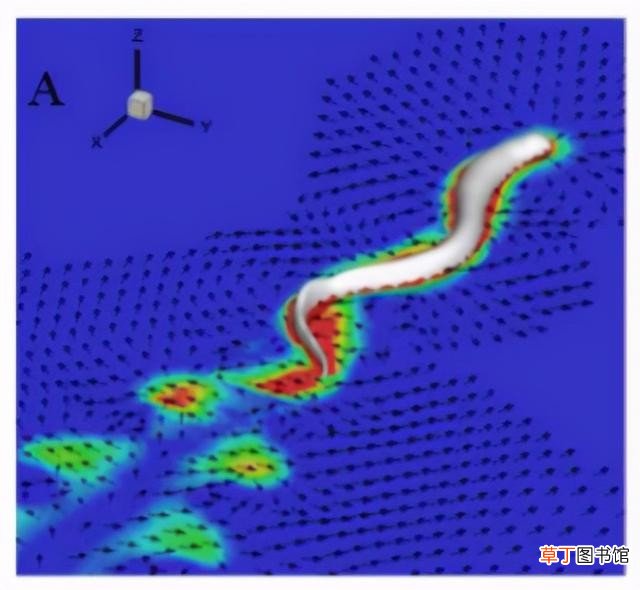
这主要还是和鱼的形状有关 , 长条形的鱼 , 比如鳗鱼 , 它在波动的时候 , 躯干部分产生的阻力是最主要的 , 因为这部分力的作用相对平滑和均匀 。
文章插图
模拟鳗鱼的主要运动方式|图源:文献1
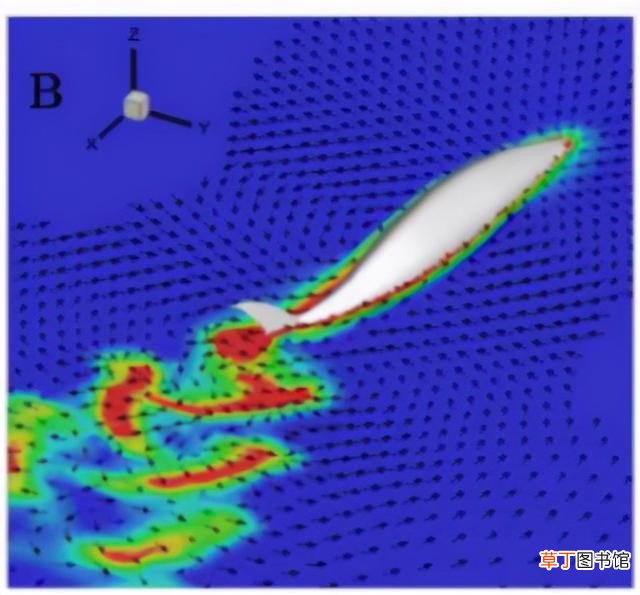
而对于鲭鱼 , 这类形状比较普通的鱼 , 它在摆动的时候 , 虽然也依靠躯干部分的阻力 , 但尾鳍左右摆动产生的反作用力也同样很重要 。
文章插图
模拟鲭鱼的运动方式
简单来说 , 身型越长条的鱼 , 越依靠躯干部分产生的作用力 , 身型越短的鱼 , 越依靠尾鳍产生的作用力 。
将动力移到尾部的鱼有一个缺点 , 那就是鱼体很容易失去侧向平衡 , 也就是说 , 它一摆尾就可能会引起头部的摇摆 。
对于这点 , 鲅鱼通过演化 , 把自己身体中部垂直面提高 , 增重躯干前面的重量(可以说是增加配重) , 来增大左右摆动的阻力 , 避免了游泳的时候偏来偏去 。
虽然科学家最终搞清楚了鱼到底是如何游动的 , 但他们并没有搞懂鱼游动过程中能量是如何转移利用的 , 这也是为什么直到现在 , 我们还没能造出一个完美的仿生鱼游动装置 。
之前造出来的仿生鱼虽然可以模拟鱼的游动效果 , 但问题还有一大堆:要么游得太慢 , 要么功耗太高 , 要么躯体过大 , 要么结构复杂 。
- 河蚌体内珍珠的形成过程是
- 12w灯泡一小时耗电量
- 10h是什么意思
- 猫屎咖啡是真的猫屎吗
- 牛肉是属于发的东西吗
- 辣椒酱的制作方法及配料
- 监控不显示画面怎么办
- 13妖什么牌
- 苹果x手机电池容量是多少
- x和xs外观区别是什么